数字图像处理 作业四
前言
本系列文章为学校课程《数字图像处理》布置的一些小project作业
除了给出每个问题的解答和代码,我也会附上相关知识点,以方便后续复习
前置概念
图像复原
基本概念
图像复原的目的是针对质量降低或失真的图像,试图恢复其原始的内容或质量

获得使图像质量下降的先验知识,建立退化模型是图像复原处理的前提与关键
图像恢复总是假定已知或可以通过估计得到引起图像降质的模型,而图像增强不需要知道图像降质模型
图像退化与复原模型
引起图像质量下降的客观因素:
成象系统的象差、畸变、带宽有限等造成图像失真
几何失真:由于成象器件拍摄姿态和扫描非线性引起
灰度失真:光学系统或成象传感器本身特性不均匀,造成同样亮度景物成象灰度不同
- 运动模糊:成象传感器与被拍摄景物之间的相对运动,引起所成图像的运动模糊
辐射失真:由于场景能量传输通道中的介质特性如大气湍流效应、大气成分变化引起图像失真
噪声干扰:图像在成象、数字化、采集和处理过程中引入的噪声等
针对上述客观因素,建立图像退化模型,是进行图像复原处理的第一步

降质图像可表示为:$g(x, y) = H[f(x, y)] + \eta(x, y)$,其中是综合所有退化因素的函数
建立图像退化模型,即获得退化系统$H$和噪声$\eta$的模型
图像复原基本原理
图像复原的本质即沿着使图像降质的逆过程恢复图像本来面貌
实际的复原过程相当于设计一个滤波器,使其能从降质图像中计算得到真实图像的估值 ,使其根据预先规定的误差准则,最大程度地接近真实图像 。
逆问题经常存在非唯一解,甚至无解。为了得到逆问题的有用解,需要有先验知识以及对解的附加约束条件
我们可以使用线性系统来近似退化过程,这样图像的退化可以看作原始图像与退化函数的卷积,因此线性图像复原往往被称为图像去卷积(反卷积),所采用的滤波器称之为去卷积滤波器
噪声模型
噪声模型及参数估计

下面是常见的噪声的概率密度函数图

其中横轴$z$表示灰度值,而纵轴则表示该灰度值出现的概率
下图是不同噪声的效果比较

总的来说,我们想要建立一个噪声模型,关键是得到或估计其参数
对于Gaussian, uniform, Rayleigh, Erlang, exponential noises等噪声,关键是得到其均值与方差
$ \mu = \sum_{z_i \in S} z_i p(z_i) $
$\sigma^2 = \sum_{z_i \in S} (z_i - \mu)^2 p(z_i) $
而脉冲噪声(椒盐噪声)则类通过直方图获取参数$P_a$和$P_b$

只存在噪声的复原
对于只存在噪声的图像的复原,我们通常选择空间滤波技术

固定滤波器
固定滤波器(Fixed Filters),也常被称为预定义滤波器或非自适应滤波器,是图像处理中一类预先定义好的滤波器,它们有固定的模板(kernel)或掩模(mask)。这些滤波器不会根据图像内容或其他外部信息改变其内核值
下面是一些常见的固定滤波器
算术均值滤波器 (Arithmetic Mean Filter):
$S_{xy}$ 是以像素$(x, y)$为中心的邻域集合。
$g(s, t)$ 是输入滤波器的图像在位置$(s, t)$的像素值。
几何均值滤波器 (Geometric Mean Filter):
- 非线性滤波
- 平滑度与算术滤波器相当
- 图像细节丢失更少
谐波均值滤波器 (Harmonic Mean Filter):
- 对“盐”噪声较好
- 不适用于“胡椒”噪声
- 善于处理高斯噪声
当然还有一类固定滤波器,它们基于像素的顺序统计特性决定其相应值


固定滤波器在图像恢复上存在一定的缺陷:
固定滤波器未考虑图像的局部特性,难以达到更好效果
为提高滤波性能,固定滤波器日益复杂,但适用面却日益缩小
滤波器窗口越大,图像细节丢失越严重
通常须在保存图像细节与噪声滤除之间寻求某种折衷
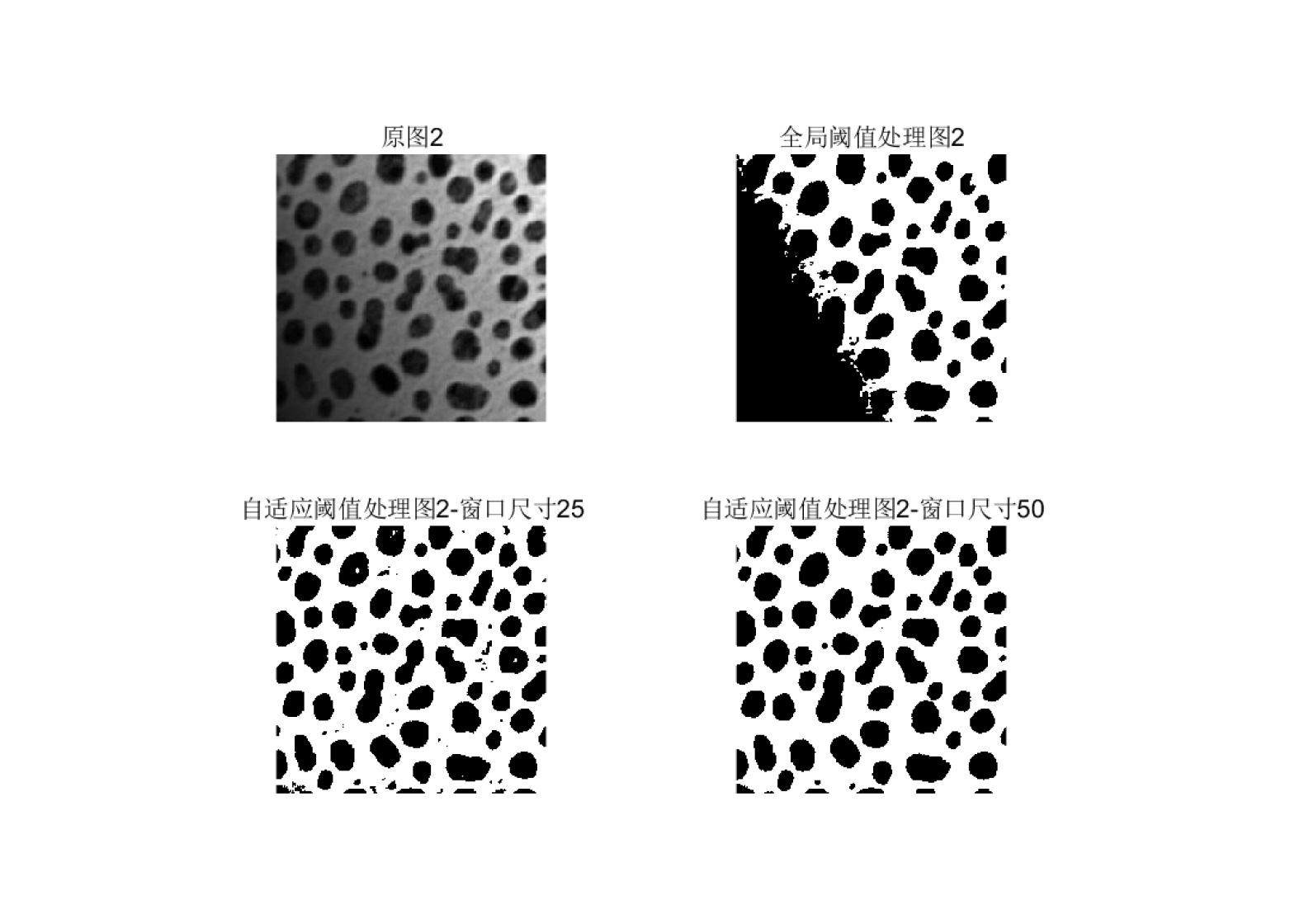
自适应滤波器
自适应滤波器很好的解决了固定滤波器的问题
通过结合图像的局部特性,它能自动修改滤波器参数或滤波策略

除了以均值和方差建立的自适应模型,还有如下的自适应中值滤波器



频域滤波降低周期噪声
常用的频域滤波有两种:带阻滤波器和陷波滤波器
带阻滤波器(Band-stop Filter)
带阻滤波器设计用来抑制一定频率范围内的信号,同时允许其他频率的信号通过。它在频域中形成一个“带阻”区域,这个区域对应于周期性噪声的主要频率成分。
- 应用场景:当周期性噪声的频率集中在一个较宽的频率范围内时,带阻滤波器特别有效。
- 设计考虑:需要确定噪声频率的上下界,并据此设计滤波器。
- 效果:能够同时抑制多个相近的周期性噪声频率。

一个带阻滤波效果的例子如下

陷波滤波器(Notch Filter)
陷波滤波器是一种更加精确的滤波方式,它旨在抑制一个或几个特定的频率点,而对其他频率的信号影响较小。这种滤波器在频域中形成一个或多个“陷阱”,精确地消除特定频率的噪声。
- 应用场景:当周期性噪声集中在一个或几个非常特定的频率点上时。
- 设计考虑:需要精确知道噪声的频率,并在这些频率点上设计陷波。
- 效果:非常精确地消除特定频率的噪声,对其他频率成分的影响很小。


注意上图中右上角为噪声的频域图像,我们需要消除它则需要纵轴上的陷波滤波器
系统退化

估计退化函数
对退化函数$H(u,v)$的估计过程常称为系统辨识过程

图像观察估计法
选择图像中具有强信号与强特征的局部区域图像$g_s(x,y)$,设法构建一个具有相同大小与特征、但没有退化
的近似图像 ,可有$H_s(u,v) = \frac{G_s(u,v)}{\hat{F}_s(u,v)}$
试验估计法
使用或设计一个与图像退化过程相似的装置(过程),使其成像一个脉冲,可得到退化系统的冲激响应
$H(u,v) = \frac{G(u,v)}{A}$
模型估计法
从引起图像退化的基本原理进行推导,进而对原始图像进行模拟,在模拟过程中调整模型参数以获得尽可能精确的退化模型
常见的模型有下面几种
大气湍流模型:$H(u,v) = \exp \left[ -c (u^2 + v^2)^{\frac{5}{6}} \right]$
大气扰动模型:$h(i,j) = K \cdot \exp \left( -\frac{i^2 + j^2}{2 \sigma^2} \right)$
运动模糊模型:$H(u,v) = \frac{T}{\pi (ua + vb)} \sin \left[ \pi (ua + vb) \right] e^{-j \pi (ua + vb)}$
光学散焦模型:$H(u,v) = \frac{J_1(\pi d \rho)}{\pi d \rho} \ \rho = (u^2 + v^2)^{\frac{1}{2}}$
想要进行模型估计,可以采取点扩展函数法
点扩展函数法的思想就是将退化函数看作将一个点光源(或不同频率的光源)输入成像系统,输出则是相应的PSF(或PSF的傅里叶变换函数)
逆滤波

但是这周自己哦空额的逆滤波存在一个问题
$F(u,v) = \frac{G(u,v)}{H(u,v)}-\frac{N(u,v)}{H(u,v)}$
当$H(u,v)$等于零或非常小的数值点上,噪声的影响会大大增强
一种改进方法是伪逆滤波复原
通过对$H(u,v)$规定一个门限值
$H^{-1}(u,v) =
\begin{cases}
\frac{1}{H(u,v)}, & |H(u,v)| > \delta \
0, & |H(u,v)| \leq \delta
\end{cases}$
当我们针对特定噪声进行逆滤波,例如高斯白噪声
那么$H(u,v)$可能在很高的频率时趋于零
此时我们只需对伪逆滤波施加圆形范围限制即可

最小均方误差滤波(维纳滤波)
维纳滤波假设图像和噪声均属于随机信号(平稳随机过程),且相互之间互不相关
而目标是寻找最佳复原图像,使得均方误差最小

维纳滤波的结果如下
$\hat{F}(u,v) = \frac{\left| H(u,v) \right|^2}{\left| H(u,v) \right|^2 + S_n(u,v)/S_f(u,v)} \cdot \frac{G(u,v)}{H(u,v)}$
不过值得注意的是,维纳滤波器建立在最小化统计准则基础上,只是在平均
意义上最优
HW 图像退化与复原
作业要求:
- 使用教科书中的方程(5.6-11)实现一个模糊滤镜,并用参数 a=b=0.1 和 T=1 对测试图像 ‘book_cover.jpg’ 进行模糊处理。(20%)
- 向模糊图像添加均值为0、方差为500的高斯噪声。(10%)
- 使用逆滤波恢复模糊图像和模糊噪声图像。(30%)
- 使用至少3个不同参数的参数化维纳滤波恢复模糊噪声图像,并与3的结果进行比较和分析。(40%)
原图如下
在开始任务之前,考虑到后续生成的中间图像的像素值范围可能超过$[0,255]$,我们需要定义一个归一化函数,方便后续归一化并保存中间图像
1 | function result = normalize_image(image) |
图像模糊
首先完成第一个任务
教科书中的5.6-11方程为图像运动模糊模型
首先我们读取图像,并将其转到频率域
1 | I = imread('book_cover.jpg'); |
由于后续有较为复杂的操作,我们需要使用double()将I变为实数矩阵
我们按照题目定义运动模糊模型的参数
1 | a = 0.1; |
接下来我们就可以定义运动模糊模型的退化函数了
1 | H = zeros(M,N); |
当然,我们需要额外增加判断,避免退化函数中pi * ((u-M/2)*a + (v-N/2)*b这一部分太小,导致比值趋近于无穷大,当x为0时,我们应该将H设为一个有限值
我们将退化函数与原图的频域相乘,进行模糊处理
1 | G = H .* F; |
注意在最后需要对空域的模糊图像进行归一化
得到下图结果
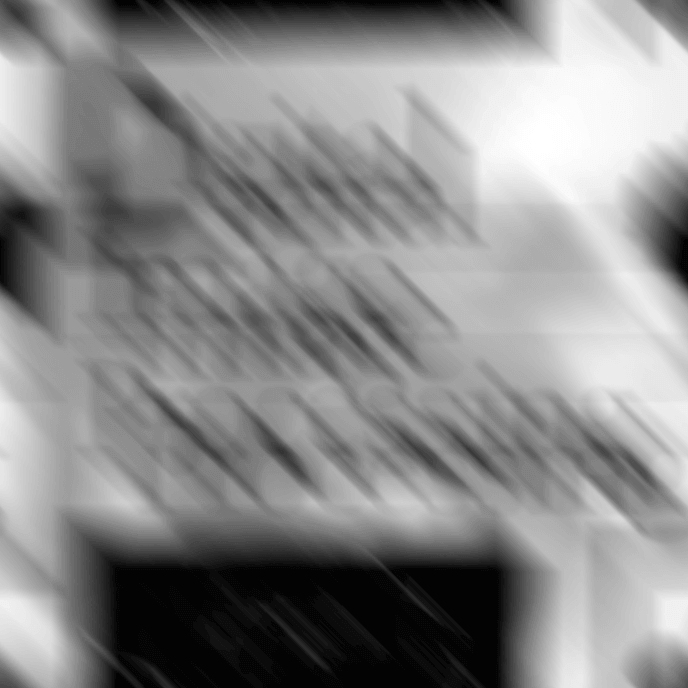
可以发现非常接近现实生活中因为物体运动而产生的模糊图片
添加噪声
第二个任务是向模糊图像添加高斯噪声,这样可以得到完整的退化模型
首先我们根据题目的要求,生成一个均值为0、方差为500的高斯噪声
1 | noise = randn(M,N) * sqrt(500); |
将噪声与模糊图像相加,得到模糊噪声图像
1 | Gn = G + Fn; |
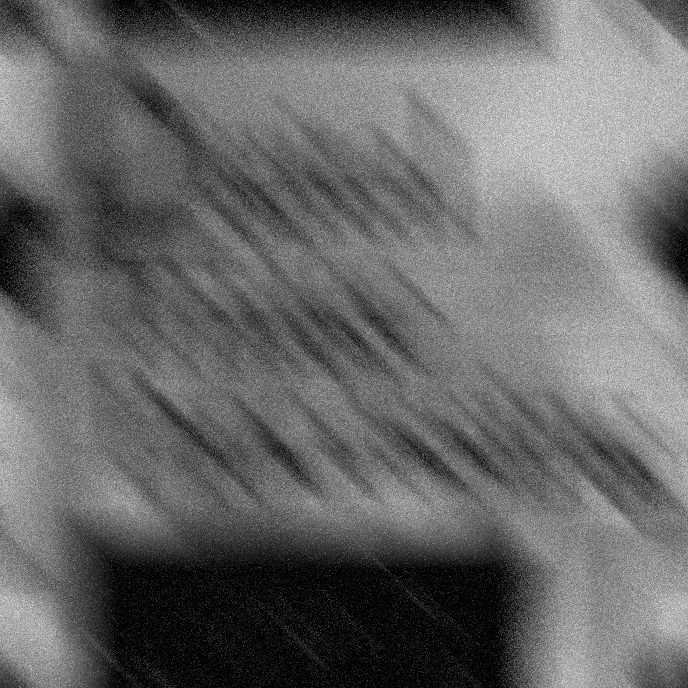
我们可以将原图和两张生成的退化图像进行对比

逆滤波复原
将模糊图像和模糊噪声图像分别除以退化函数,得到复原后的图像
1 | % 逆滤波恢复模糊噪声图像 |
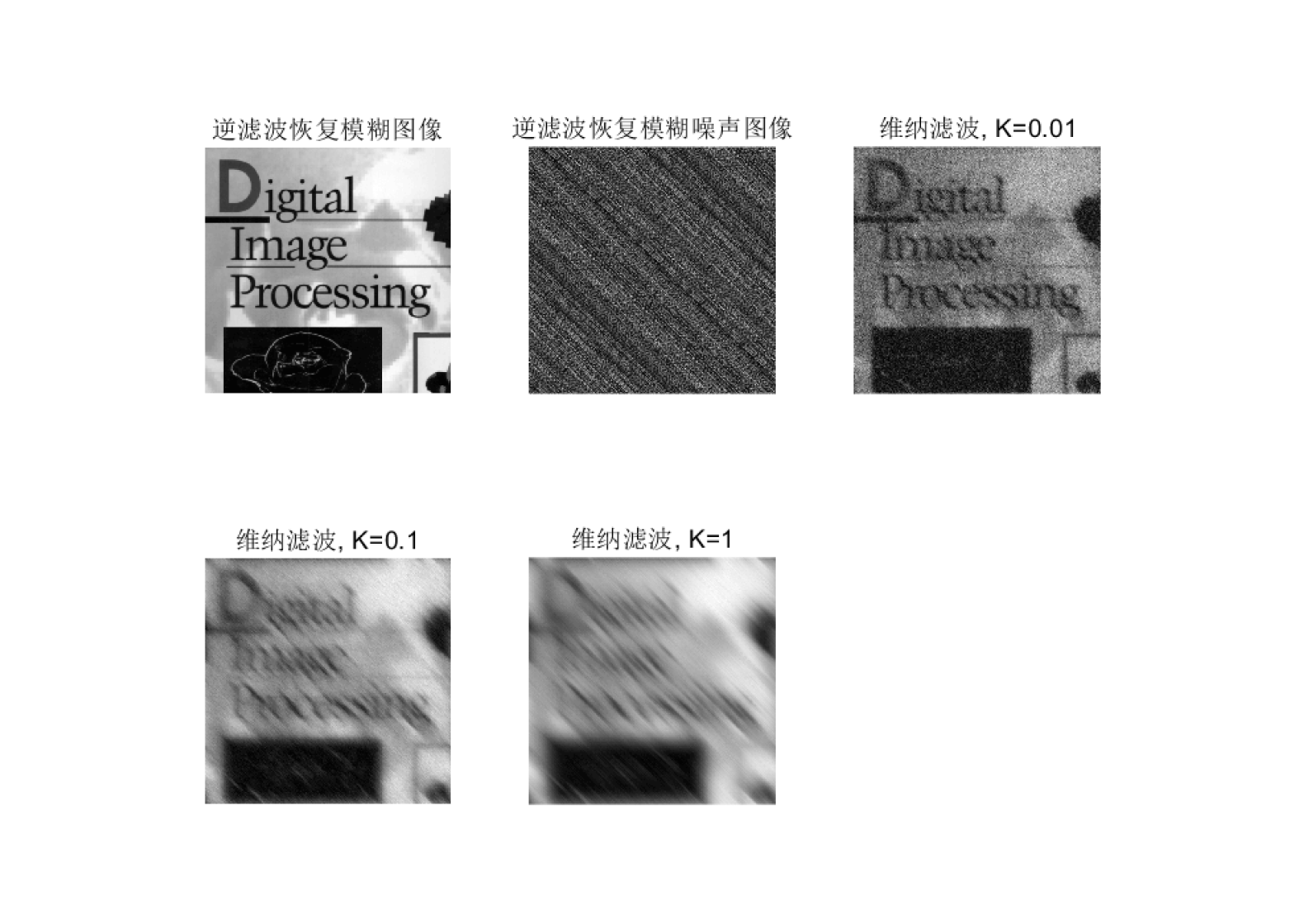
下图是模糊图像的逆滤波复原图
可以发现和原图基本一致
而下图是模糊噪声图像的逆滤波复原图
可以发现比原来的噪声强度还大
我们可以从逆滤波的公式中找到原因
$F(u,v) = \frac{G(u,v)}{H(u,v)}-\frac{N(u,v)}{H(u,v)}$
对于仅仅模糊的图像(不含噪声),如果已知确切的模糊函数,逆滤波可以恢复得到原始图像
而当存在噪声时,由于噪声通常具有高频成分,在逆滤波的过程中,除以模糊核的频率响应会放大这些高频成分,导致噪声也被显著放大
维纳滤波
我们定义三个维纳滤波参数K = [0.01, 0.1, 1]
根据这三个参数分别得到维纳滤波的复原图像
1 | F_wnr = zeros(M,N,length(K)); |
将生成的维纳滤波图像与逆滤波复原图放在一个窗口进行对比

可以观察到,维纳滤波的权衡因子k越小,噪声越多,但对模糊的复原也越好,分析原因如下:
- 当K较大时,滤波器更倾向于抑制噪声,但也可能导致图像细节的损失。这是因为大的K值会减少滤波器在频域中对高频成分的增强,而噪声主要存在于高频部分。
- 当K较小时,滤波器更专注于逆转模糊效果,这可能导致噪声被放大,但同时也能更好地保留图像的细节和边缘。
当然,在存在噪声时,与逆滤波的效果相比,维纳滤波的效果更好,这是因为逆滤波对噪声更加敏感
而维纳滤波能够根据噪声的存在进行调整,平衡去模糊和降噪,从而在不过度放大噪声的同时恢复图像。